Opis Ogółny
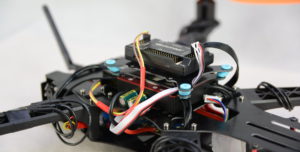
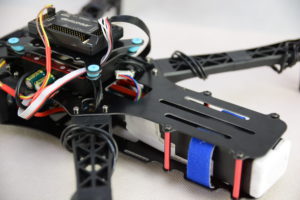
Najbardziej wymagającym projektem, który udało nam się sfinalizować do tej pory jest Quadcopter. Wstępna budowa oraz konfiguracja zajęła nam 2 miesiące. Była to długa i wymagająca praca, po której uświadomiliśmy sobie jak duże postępy robimy z miesiąca na miesiąc. Początkowo bardzo czasochłonne było tworzenie kosztorysów. W trakcie budowy napotykaliśmy wiele problemów, z którymi radziliśmy sobie dzięki systematycznie pogłębianej wiedzy. Po 2 miesiącach pracy udało nam się zbudować Quadcopter, którego rozpiętość ramion wynosi 60 cm. Urządzenie wyposażyliśmy w akumulator który pozwala na ciągły lot przez 20 min. Aby wykorzystać w pełni czas jaki może być w powietrzu wykorzystaliśmy aparaturę sterującą o zasięgu 1 km oraz kamerkę transmitującą obraz na żywo. Kontroler lotu znajdujący się na pokładzie wyposażony jest w czujniki: barometr, akcelerometr, żyroskop oraz aktualnego napięcia baterii. Zamontowaliśmy do niego cztery silniki o łącznej mocy 880w. Osoby będące w trakcie nauki latania mogą również wykorzystać wbudowany system GPS pozwalający na bardzo stabilny lot. Rama Quadcoptera mimo że nie jest wykonana z włókna węglowego, spełnia swoje zadanie. W przyszłości mamy zamiar dodać możliwość nagrywania filmów ze stabilizacją obrazu. Stworzenie go było możliwe dzięki dofinansowaniu jakie dostaliśmy z urzędu miasta.
Dokładna specyfikacja:
- Kontroler Lotu APM 2.8 + GPS
- 4 Silniki Emax MT2216 810 KV 228W
- Akumulator Li-Po 4S1P 4400mAh
- Odbiornik FlySky FS-iA6B 2,4GHz
- Aparatura FlySky FS-i6X 10CH
- Gogle Eachine VR-007 Pro 5,8GHz 40CH
- Nadajnik FPV TS5823 5,8GHz 48CH
- Kamera FPV HS1177 600TVL
- Rama Reptile 500 V3