Osoby zainteresowane przystąpieniem do prac w ramach koła zainteresowań „Robonomik” zapraszamy na kolejne spotkanie robocze w dniu 11 września (wtorek) o godzinie 16. Prosimy o zapoznanie się przed przybyciem z materiałami na temat naszej działalności, organizacji FIRST, grupy Spice Gears oraz konkursu Lubelskie: Liga robotyki. Robonomik https://robonomik.ekonomikzamosc.pl/ https://www.facebook.com/robonomik/ Spice Gears FRC 5883 http://test.spicegears.pl/ https://www.facebook.com/spicegears/ https://www.youtube.com/channel/UCz0azzvreMQdKFSD5oH1_PA Konkurs Lubelskie: Liga Robotyki http://ligarobotyki.pl/ https://www.facebook.com/lubelskieligarobotyki Organizacja FIRST https://pl.wikipedia.org/wiki/FIRST_(organizacja) https://www.firstinspires.org/ Konstrukcja i programowanie robota kategorii FTC:…Continue reading Informacje dla nowych członków koła zainteresowań „Robonomik”

Lubelska liga robotyki – spotkanie organizacyjne
Koło zainteresowań „Robonomik” zaprasza pasjonatów robotyki, programowania, mechaniki na spotkanie organizacyjne w sprawie udziału naszej drużyny w Lubelskiej Lidze Robotyki organizowanej przez Fundację Centrum Młodzieżowej Robotyki oraz Fundację Rozwoju i Aktywności Społecznej “Przyjaźń” pod bezpośrednim nadzorem FRC 5883 Spice Gears. Spotkanie odbędzie się w poniedziałek 3 września po oficjalnym rozpoczęciu roku szkolnego i zakończeniu spotkań z wychowawcami w sali komputerowej 16. Lubelskie: Liga Robotyki to pierwszy w Polsce tego typu konkurs, skierowany do uczniów szkół…Continue reading Lubelska liga robotyki – spotkanie organizacyjne

Robonomik z wizytą u grupy Spice Gears z Kraśnika
W dniu 26 czerwca 2018 roku uczniowie naszej szkoły należący do koła zainteresowań „Robonomik” odwiedzili grupę Spice Gears w ich warsztacie mieszczącym się w Zespole Szkół Nr 3 w Kraśniku. Spice Gears FRC 5883 Grupa Spice Gears jest pierwszą i jak dotąd jedyną drużyną w Polsce i Europie Środkowo-Wschodniej, która uczestniczy w międzynarodowych konkursach organizowanych przez organizację FIRST. Jej celem jest zachęcanie młodych ludzi do rozwinia swoich zainteresowań technicznych poprzez doświadczenie w pracy z inżynierami podczas…Continue reading Robonomik z wizytą u grupy Spice Gears z Kraśnika

Rozdzielone zasilanie w układach elektronicznych.
Wstęp Gdy zaczynamy konstruować bardziej zaawansowane układy, które posiadają wrażliwe podzespoły takie jak mikrokontrolery, układy cyfrowe etc. oraz elementy, które pobierają duże prądy, zachodzi potrzeba na rozdzielone zasilanie części sterującej oraz głównego zasilania (mocy). Takie rozwiązanie stosuje się aby zminimalizować ilość zakłóceń trafiających do wrażliwych części układu, powodując niestabilność pracy. Źródło energii elektrycznej Jeśli tworzymy projekt, który musi być mobilny, korzystamy z akumulatorów, mają one wyznaczone przedziały…Continue reading Rozdzielone zasilanie w układach elektronicznych.
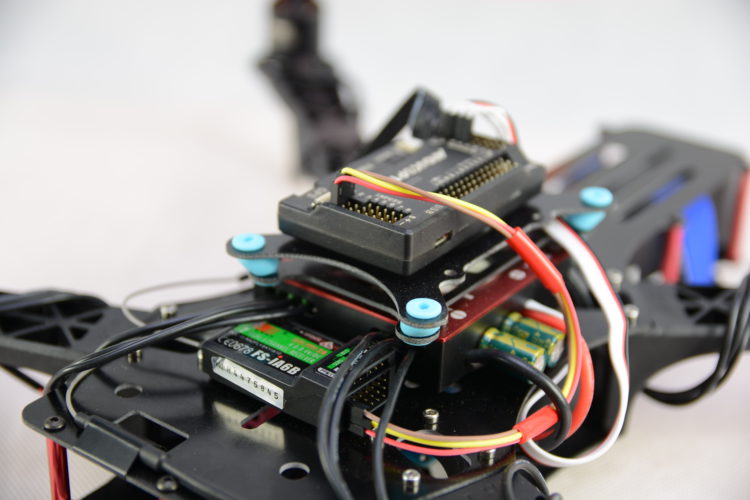
ArduPilot – komputer pokładowy do dronów
Ogólny opis APM inaczej zwany ArduPilot, kontroler wehikułu naziemnego bądź latającego. Jego sercem jest 8 bitowa ATmega2560. Obecnie większość komputerków pokładowych wykorzystuje procesory STM32, są one szybsze, dokładniejsze, pojemniejsze oraz posiadają nowsze interfejsy lecz ArduPilot nie pozostaje w tyle. Nadrabia to swoim środowiskiem konfiguracyjnym – Mission Planner’em. Dodatki do kontrolera Do Ardupilot’a można dokupić wiele elementów peryferyjnych, omówię kilka z nich i czego wystrzegać się podczas zakupu. Pierwszym elementem jest…Continue reading ArduPilot – komputer pokładowy do dronów

Łazik omijający przeszkody na millis() część 1
Teoria Stosowanie w Arduino delay() jest bardzo popularne. Niestety, mimo że jest łatwe w implementacji posiada bardzo dużą wadę – zatrzymuje program na określoną ilość czasu, przez co procesor nie może wykonywać kolejnych instrukcji. Rozwiązaniem tego jest funkcja millis(), bowiem zwraca ona ilość milisekund od czasu włączenia procesora. Najlepiej funkcję millis przypisać do dużej zmiennej, aby szybko nie doszło do przepełnienia zmiennej np. unsigned long. Nasz mały łazik został napisany w millis, dzięki czemu może…Continue reading Łazik omijający przeszkody na millis() część 1