Ogólny opis
APM inaczej zwany ArduPilot, kontroler wehikułu naziemnego bądź latającego. Jego sercem jest 8 bitowa ATmega2560. Obecnie większość komputerków pokładowych wykorzystuje procesory STM32, są one szybsze, dokładniejsze, pojemniejsze oraz posiadają nowsze interfejsy lecz ArduPilot nie pozostaje w tyle. Nadrabia to swoim środowiskiem konfiguracyjnym – Mission Planner’em.
Dodatki do kontrolera
Do Ardupilot’a można dokupić wiele elementów peryferyjnych, omówię kilka z nich i czego wystrzegać się podczas zakupu. Pierwszym elementem jest moduł zasilania, posiada on zazwyczaj wbudowany czujnik natężenia (przepływu) prądu oraz woltomierz. Z mojego doświadczenia wiem, że nie należy zbyt bardzo sugerować się danymi, które otrzymujemy. O ile nie jest to oryginalny moduł od 3DR Robotics, to zwykłe klony mają bardzo rozbieżne poglądy na temat obecnego przepływu prądu przez przewody. Kolejnym elementem jest moduł lokalizacyjny. Służy on do bardzo stabilnego lotu, planowania trasy oraz powrotu do miejsca startu. Jak widać jest on bardzo pomocny. Jeśli planujemy zakup takiego wynalazku, nie należy kupować najtańszych modeli, ponieważ na lokalizatorze spoczywa bardzo ważna funkcja korekty lotu a przecież nie chcemy aby dron odleciał i już do nas nie wrócił. Lecz uspokajam, nawet klony w miarę dobrze radzą sobie z lokalizacją wehikułu.
Instalacja oprogramowania
Przy pierwszej konfiguracji radzę skorzystać z Wizarda, czyli pomocnika prowadzącego nas za rączkę przez najważniejsze etapy. Mamy do wyboru kilka różnych firmware’ów, między innymi do naziemnego łazika, helikoptera, samolotu czy dronów. W dalszym etapie będziemy musieli obracać kontroler aby skalibrować kompas, stawiać go w różnych pozycjach: góra, dół, prawo, lewo etc., żeby ustawić akcelerometr. Gdy już przebrniemy przez pierwsze etapy przychodzi czas na montaż.
Montowanie zestawu do wehikułu
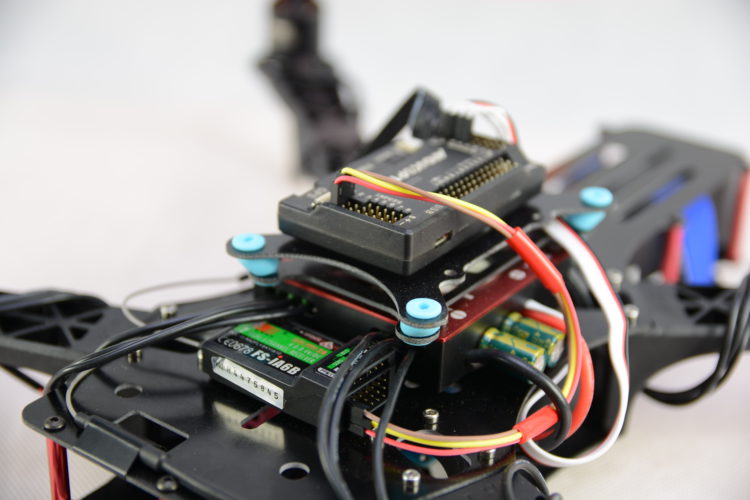
Razem z zakupionym Ardupilot’em dostajemy 4 gumki antywibracyjne i 2 podstawki, należy je połączyć ze sobą właśnie za pomocą tych gumek (Damperów). Ma to na celu wyeliminować mikro drgania powodujące błędne odczyty (czyt. poszarpane). Do jednej z wybranych podstawek za pomocą taśmy dwustronnej przyklejamy obudowę APM’a, pamiętając o odpowiednim ustawieniu mikrokontrolera. Posiada on strzałkę informującą gdzie znajduje się przód.
Jeszcze kilka słów o ArduPilot’cie
Projekt komputera pokładowego został porzucony na rzecz Pixhawk’a, który to został wyposażony w procesor 32 bitowy od STMicroelectronics, dając większe możliwości rozwoju. Na sam początek przygody z modelami RC, kontroler APM to idealny komputer z dużą ilością zabezpieczeń i konfigurowalnych parametrów.