
Wstęp
Gdy zaczynamy konstruować bardziej zaawansowane układy, które posiadają wrażliwe podzespoły takie jak mikrokontrolery, układy cyfrowe etc. oraz elementy, które pobierają duże prądy, zachodzi potrzeba na rozdzielone zasilanie części sterującej oraz głównego zasilania (mocy). Takie rozwiązanie stosuje się aby zminimalizować ilość zakłóceń trafiających do wrażliwych części układu, powodując niestabilność pracy.
Źródło energii elektrycznej
Jeśli tworzymy projekt, który musi być mobilny, korzystamy z akumulatorów, mają one wyznaczone przedziały napięć w jakich działają, a spadek napięcia nie jest liniowy, dlatego dla stabilnej pracy polecam kupić akumulator o większym nominalnym napięciu niż wymaga projekt z uwagi na to że obniżanie napięcia jest bardziej wydajne niż podwyższanie. Jeśli konstruujemy, z myślą o stacjonarnej pracy urządzenia to sięgamy po wszelakiego rodzaju zasilacze. Najbardziej wydajnym, będzie oczywiście zasilacz impulsowy, lecz on też posiada wady. Mianowicie jego impulsowa charakterystyka pracy. Generuje on zakłócenia w postaci impulsów. Można to rozwiązać za pomocą kondensatorów najlepiej Low ESR (niska rezystancja) oraz dławików. Niestety nic nie jest idealne także przedstawione rozwiązanie z kondensatorem i dławikiem, zawsze jakaś część impulsów i tak wypłynie na wyjściu.
Zasilanie części sterującej
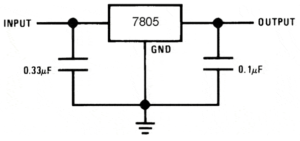
Ta część układu zazwyczaj nie pobiera dużych prądów a jej nominalne napięcie jest zależne od wykorzystanych scalaków standardowo jest to 5V lub 3,3V. Można je wykonać stosując stabilizator liniowy jego plusem w stosunku do przetwornic, jest jak sama nazwa wskazuje liniowa charakterystyka pracy. Przez co nie generuje on (prawie) żadnych zakłóceń. Niestety stabilizatory mają bardzo niską sprawność rzędu 50-60%. Stosowanie ich ma sens tylko w układach o niskim poborze mocy, właśnie jakimi są elementy sterujące. Stosując takie rozwiązanie należy pamiętać o dodatkowych kondensatorach na wejściu i wyjściu stabilizatora. Pamiętaj, że mimo małego prądu płynącego przez ścieżki na PCB, prowadzące zasilanie do części sterującej, one same też potrafią generować zakłócenia jak i je zbierać. Nie prowadź ścieżek blisko elementów, które mają zmienny charakter działania np. cewki, przetwornice, silniki. Izoluj ścieżki sygnałowe za pomocą pola masy, twórz je z myślą o jak najkrótszym możliwym dystansie.
Zasilanie do elementów o dużym poborze mocy
Jest to najbardziej kłopotliwy temat. Przekonałem się na początku swojej pasji do elektroniki, kiedy to złożyłem swój pierwszy projekt łazika. Wszystko było zmontowane na płytce stykowej. Można się domyślić jak wyglądała płytka stykowa oraz +/- 50 wystających przewodów połączeniowych. Dziwiłem się dlaczego mikrokontroler resetuje się przy każdorazowym uruchomieniu silników. Problemem okazały się przewody, które były za długie przez co pojawiło się mnóstwo zakłóceń elektromagnetycznych. Dodatkowo przewody głównego zasilania znajdowały się bardzo blisko przewodów sygnałowych. Pamiętaj aby zaoszczędzić swój czas i nerwy, projektuj płytki PCB z odpowiednimi grubościami ścieżek zasilających, im węższa ty większa rezystancja czyli więcej traconej energii poprzez emisje ciepła oraz spadek napięcia na liniach. Przy projektowaniu PCB staraj się wydzielić osobne miejsca dla części sterującej np. mikrokontrolery oraz dla części sterowanej np. mostek H. Elementy o charakterze indukcyjnym (cewki, silniki, elektromagnesy) generują największe szpilki (skoki) napięcia. Pamiętaj aby te skoki filtrować za pomocą dławików, kondensatorów etc.